17+ Ziegler-Nichols Tuning Method Example Pdf
Here we will adopt the technique called the pole-zero cancellation method. This is used on machines where it is dangerous to hand-feed the machine while it is cycling.

Tuning Based Ziegler Nichols Second Method 7 Download Table
Web There are several PI gain tuning rules such as the famous ZieglerNichols method.
. We are using the relay CR1 to operate the lights because generally the current required to operate a bank of room lights is higher than the maximum current a PLC output can carry. Web The mathematical model is seen as a good simulation approach compared with the experimental open loop control test. Web While manual tuning can be very effective at setting a PID circuit for your specific system it does require some amount of experience and understanding of PID circuits and response.
Web When fully assembled this compact device measures just 437 x 29 x 669 111 mm x 735 mm x 1699 mm ideal for tightly packed setups. As well as Simple-PID. Synthesis of PID controllers.
Similar to the ZieglerNichols method a set of tuning parameters were developed to yield a closed-loop response with a decay ratio of. Web Example PageIndex1. Web Download Free PDF.
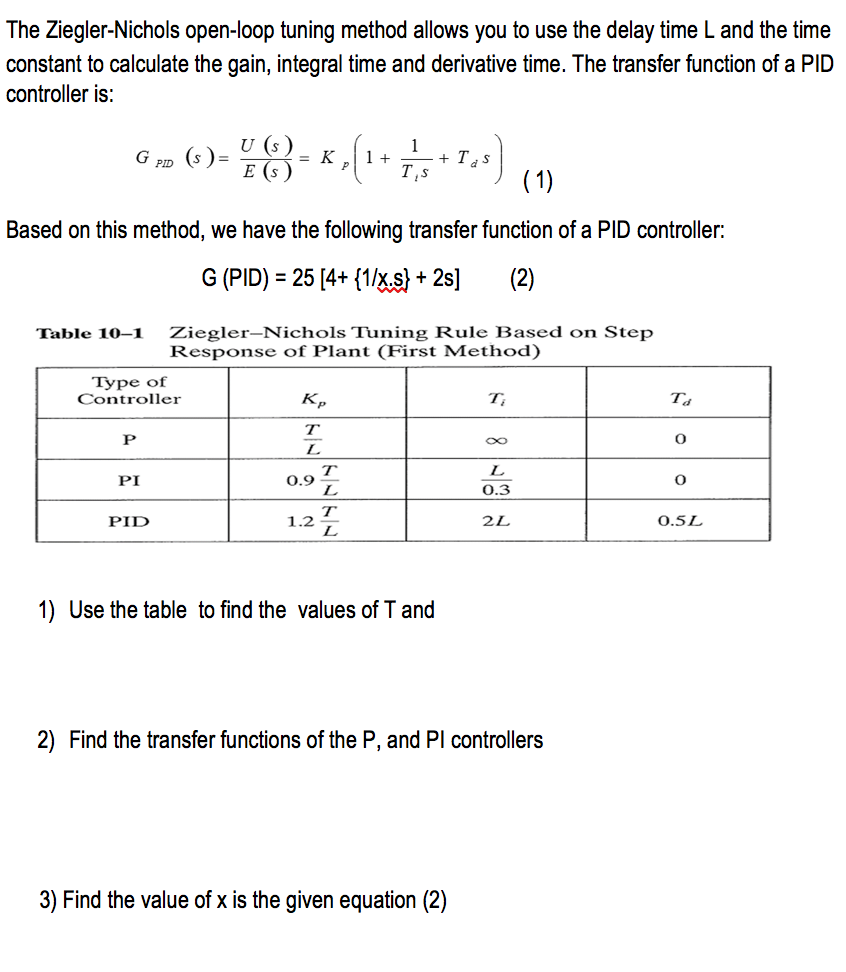
A six degree-of-freedom robot manipulator has 18 gains to be tuned. Open Loop Feed Forward Loop To use the Ziegler-Nichols open-loop tuning method you must perform the following steps. Web Carro1pdf - Free download as PDF File pdf Text File txt or read online for free.
Web In the SIL example of Figure 17 and Figure 18 given that high-frequency IMU noise is filtered W T is taken to be zero to focus on wind disturbance rejection and reference tracking but noise rejection can also. Again youll want to set the integral and derivative gain to. Again youll want to set the integral and derivative.
Web Figure 3-9 - PLC Wiring Diagram for Example. The following graph shows how inlet flow and both the hot and cold outlet temperatures vary as sinusoidal functions of time. This is based more on a setp oint response.
Determine the Phase Shift. A technical and economic assessment of CO2 capture technology for IGCC power plants. Fiber cables can be fed through the ports on the back of the unit which are also compatible with Thorlabs FC-to-FC Mating Sleeves not included.
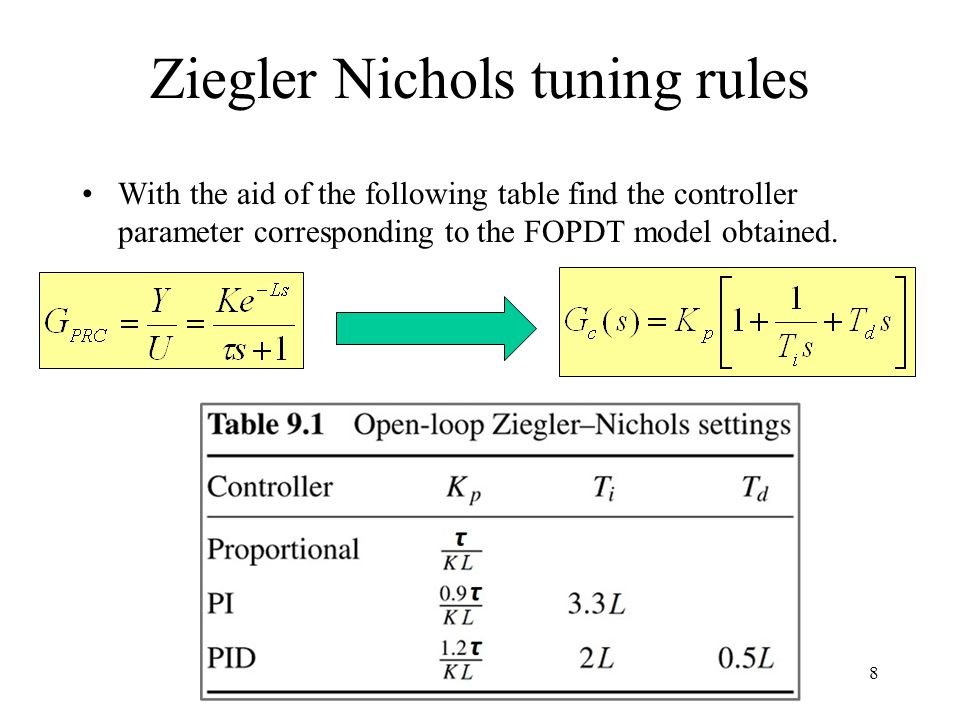
The range of admissible proportional gains is determined in closed form. Online tuning of a PID controller. Web This method was developed in 1953 and is based on a first-order time delay model.
NOVEL GAS CLEANINGCONDITIONING FOR INTEGRATED GASIFICATION COMBINED CYCLE. When one gain is tuned it requires to tune the other 17 gains in turn because of dynamics coupling in the robot. An extension of the Hermite-Biehler theorem which is applicable to quasipolynomials is used to seek the set of complete stabilizing PID parameters.
Web The problem of stabilizing a second-order delay system using classical proportional-integral-derivative PID controller is considered. Web LCS Lab 9 - Free download as PDF File pdf Text File txt or read online for free. This graph was generated using the same data for the heat exchanger of Example 1.
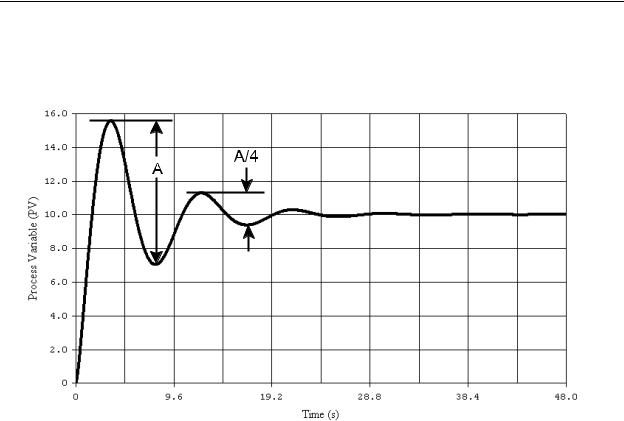
Web The ZieglerNichols method is too aggressive for many industrial control systems. The Ziegler-Nichols method for PID tuning offers a bit more structured guide to setting PID values. Web Once certain process response values are found they can be plugged into the Ziegler-Nichols equation with specific multiplier constants for the gains of a controller with either P PI or PID actions.
Notice that all four switches are shown as normally open selector switches and the output is connected to a relay coil CR1. The on-line adjustable control strategy Ziegler Nichols method and Astrom Hagglund method can be used experimentally to find the proportional and integral control gain values for acceptable control system behavior. Use this graph to find the phase shift between the inlet flow and the hot outlet.
Designing a PID Controller Using the Ziegler-Nichols Method The Ziegler-Nichols procedure. Web 12082013 234 Mб 704 PICmicro MCU C - An itroduction to programming The Microchip PIC in CCS C NGardner 2002pdf 12082013 555 Mб 122 Programmable controllersTheory and implementation LA. I went for IVMech since I saw it quoted in other projectsAug 17 2018 Some of my earlier designs were based on a single Raspberry Pi B with a GPIO splitter to allow control over 3 distinct relays.
Appendix A Complex Variable TheoryTO ACCOMPANY AUTOMATIC CONTROL SYSTEMS EIGHTH EDITIONAUTOMATIC CONTROL SYSTEMS EIGHTH EDITIONAppendix CTO ACCOMPANY AUTOMATIC CONTROL SYSTEMS EIGHTH EDITIONElementary Matrix Theory and Algebra. Web The IVMech library seems a good starting point. Web Accidents appear more frequently due to severe wind and aerodynamic instability caused by the ground 15161718.
By using the pole-zero cancellation we can remove the current control characteristic of the DC motor itself so that the PI controller may determine the performance of the current control. A novel method of adaptive internal model control has been proposed which is an essential robust control strategy based on the model 21222324. For example for a proportional controller the method specifies a GM of just 6 dB compared with the 12 dB in the P controller tuned earlier in this chapter Figure 65In general the gains from ZieglerNichols will be higher than from the methods presented here.
2001 Dennis Leppin. Design of a controller for a known plant design of a PID controller when plant model is unknown Ziegler-Nichols tuning rules and related derivations. A control design method in which a machine will not RUN or CYCLE unless two separate buttons are simultaneously pressed.
2005 Nusrat Jahan. Web Download Free PDF. This i s a step-response m ethod and uses y 0.
Web Methods and Applications Hackworth J Prentice Hallpdf. Two of the holes accept square flange mating sleeves. Web A modification o f the Ziegler-Nichols method is the Chein-Hro nes-Res wick CHR method.
Arguably the biggest problem with these parameters is that a small change in the process parameters could potentially cause. Web There are too many gains to be tuned simultaneously and heuristically for a robot via the ZieglerNichols 161 or CohenCoon 20 method. Adaptive backstepping control has been used for path tracking 1920.
Download Free PDF View PDF. The Ziegler-Nichols method for PID tuning offers a bit more structured guide to setting PID values. Web While manual tuning can be very effective at setting a PID circuit for your specific system it does require some amount of experience and understanding of PID circuits and response.
Web Compensation by frequency response methods with speci cations on gain margin and phase margin design of a compensator using Bode plots.

Pdf Tuning With Ziegler Nichols Method For Design Pid Controller At Rotate Speed Dc Motor
10 1 Introduction Chapter 10 Pid Controls Ppt Video Online Download

Pdf Application Of Ziegler Nichols Method For Tuning Of Pid Controller Semantic Scholar
Solved The Ziegler Nichols Open Loop Tuning Method Allows Chegg Com
Lecture 7 Pid Tuning Ppt Video Online Download

Pdf A New View To Ziegler Nichols Step Response Tuning Method Analytic Non Fragility Justification

Ziegler Nichols Tuning Poor Choice For Production Processes Control Guru

Ziegler Nichols Tuning Formula Download Table

Pdf A New View To Ziegler Nichols Step Response Tuning Method Analytic Non Fragility Justification

Modified Ziegler Nichols Tuning Method Download Scientific Diagram
Solved Second Method Of Ziegler Nichols For Targets Plants Chegg Com
Pdf A New View To Ziegler Nichols Step Response Tuning Method Analytic Non Fragility Justification

Pdf A New View To Ziegler Nichols Step Response Tuning Method Analytic Non Fragility Justification

Ziegler Nichols Method An Overview Sciencedirect Topics

Parameters Of K P K I And K D In Ziegler Nichols Tuning Methods Download Table

Parameters Of K P K I And K D In Ziegler Nichols Tuning Methods Download Table
10 11 The Ziegler Nichols Tuning Method